在我国山体滑坡灾害频发、地质灾害防治需求不断提升的背景下,如何在复杂山区环境中实现高效、精准、可扩展的滑坡风险监测,已成为工程领域亟需解决的重要问题。现有滑坡预测手段主要依赖倾斜仪、应力计等专业仪器开展局部监测,或采用卫星遥感、GNSS 定位等方式进行大范围感知,但在预测效率、空间覆盖范围及精度等方面仍存在一定局限。同时,由于滑坡多发生于地形起伏大、环境复杂的山区,无人机巡检过程中常面临定位信号不稳定、路径规划受限等现实问题,制约了其在灾害预警场景中的应用潜力。针对上述挑战,Flyship 项目组提出并自主研发了一种融合视觉语义 SLAM 与半航空瞬变电磁探测技术的滑坡预警无人机系统,探索复杂山区条件下滑坡灾害智能感知与综合预警的工程实现路径。
在无人机自主感知与导航方面,项目基于大疆无人机平台开展二次开发,构建了融合深度学习的视觉语义 SLAM 算法体系。通过将深度学习方法引入 SLAM 算法前端,对多源传感器数据进行特征提取与语义理解,有效提升了无人机在复杂场景下的环境感知与定位能力。在路径规划层面,项目结合工程应用对安全性与稳定性的要求,设计了一种融合AI算法与人工智能方法的路径规划策略,在兼顾全局最优性的同时提高路径生成效率,降低了无人机在复杂地形中因局部最优而导致任务失败的风险,为无人机在山区环境中的自主飞行提供了可靠支撑。
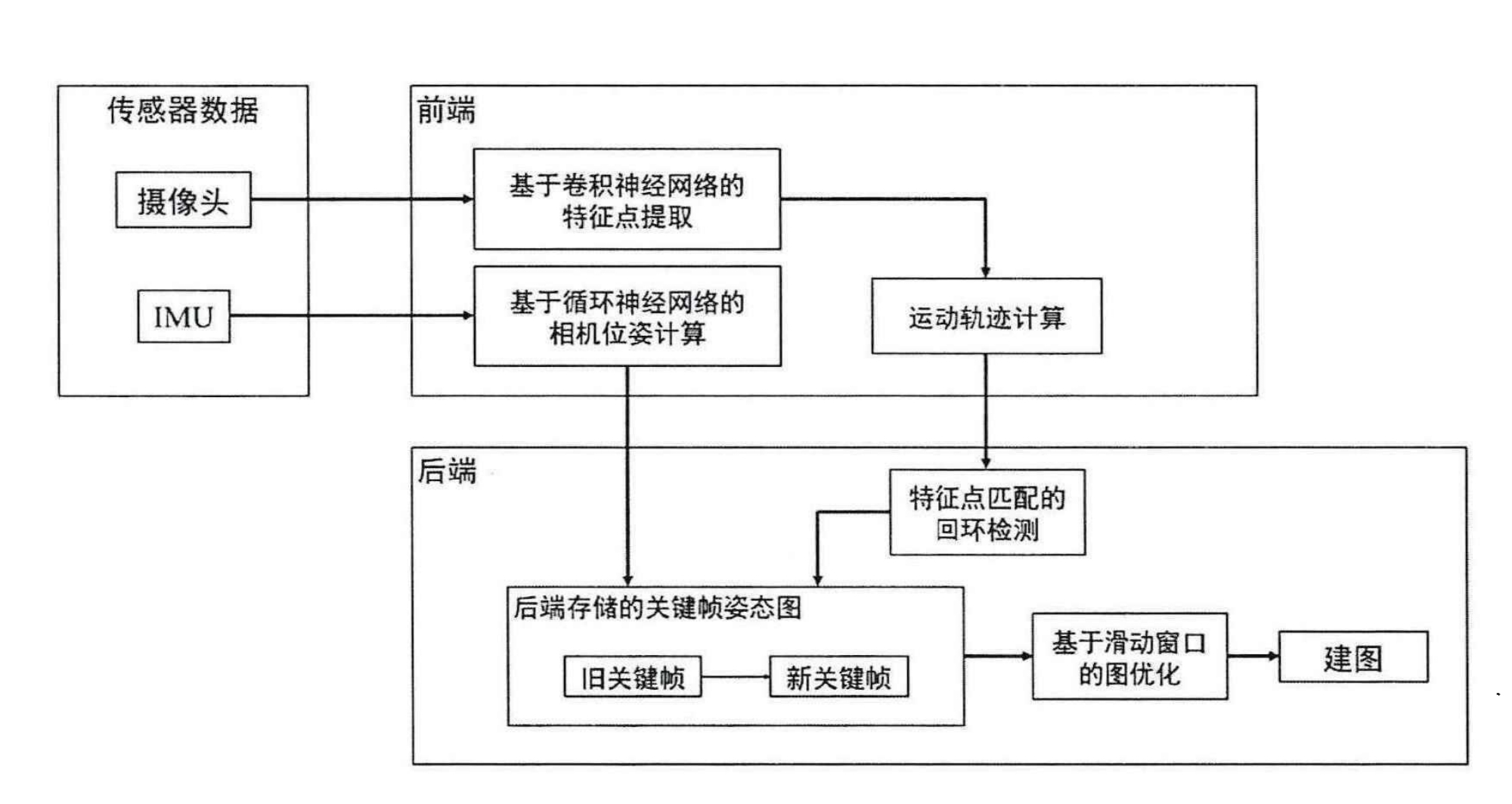
SLAM算法整体框架
基于上述算法体系,无人机系统已能够在飞行过程中对车辆车牌、行人等目标进行识别,并在无人工干预条件下实现自动避障与自主路径规划,完成从起飞点到降落点的完整飞行任务。同时,项目也对当前系统的工程约束进行了客观分析:受限于无人机平台尺寸与载荷能力,其搭载算力与识别精度仍存在进一步优化空间。围绕这一问题,项目提出了通过优化系统结构、引入强化学习与智能优化算法,逐步拓展至无人机编队飞行与多机协同路径规划的后续研究方向,为系统规模化应用奠定基础。

车辆、车牌识别效果图
在地下结构探测方面,该系统引入半航空瞬变电磁技术,利用无人机搭载的接收设备,在空中采集由地面发射源激发的地下介质二次感应信号,并通过系统化的数据处理与反演分析,重建地下介质电阻率分布特征,从而识别潜在滑坡风险区域。针对山区地质结构复杂、变化剧烈的特点,项目在正演阶段采用高效数值模拟方法,对计算流程进行优化以适应快速地质建模需求;在反演阶段结合地电模型特性,设计适应性反演算法,实现对地下电性结构的可靠反演。同时,项目组自主研发了配套的正反演软件,实现了电磁数据从采集、处理到解释与可视化的工程化流程。
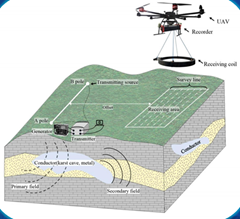
半航空瞬变电磁原理图
综合来看,本项目从系统层面验证了在复杂山区环境中,利用无人机平台融合自主导航、智能感知与地下探测技术,实现滑坡风险信息快速获取与处理的可行性。该研究为人员难以快速抵达区域的地质灾害监测提供了一种高效、非接触式的技术路径,也为山体滑坡的超前预警与防灾减灾决策提供了重要技术支撑,在保障山区人民生命财产安全及重大基础设施安全方面具有积极的工程应用价值。
【作者:李志远】